 As the drone industry grows and new manufacturers enter the market, is the use of open source drone platforms growing? The Dronecode Foundation, the organizing force behind the PX4 open source drone ecosystem, has published their Year in Review report for 2022: and the metrics tell an interesting story.
As the drone industry grows and new manufacturers enter the market, is the use of open source drone platforms growing? The Dronecode Foundation, the organizing force behind the PX4 open source drone ecosystem, has published their Year in Review report for 2022: and the metrics tell an interesting story.
 PX4 is an open-source drone ecosystem: a group of contributors committed to the transparency and philosophy of open source technology systems. The Dronecode Year in Review report includes metrics on the contributors who write the code, and a transparent look into the funding sources and expenditures of the Dronecode Foundation. “The goal of the report is to act as a barometer for the open-source segment of the drone industry and illuminate the work of the individual contributors, academic institutions, and companies that make it run,” says the Foundation.
PX4 is an open-source drone ecosystem: a group of contributors committed to the transparency and philosophy of open source technology systems. The Dronecode Year in Review report includes metrics on the contributors who write the code, and a transparent look into the funding sources and expenditures of the Dronecode Foundation. “The goal of the report is to act as a barometer for the open-source segment of the drone industry and illuminate the work of the individual contributors, academic institutions, and companies that make it run,” says the Foundation.
The Growth of Open Source Drone Platforms
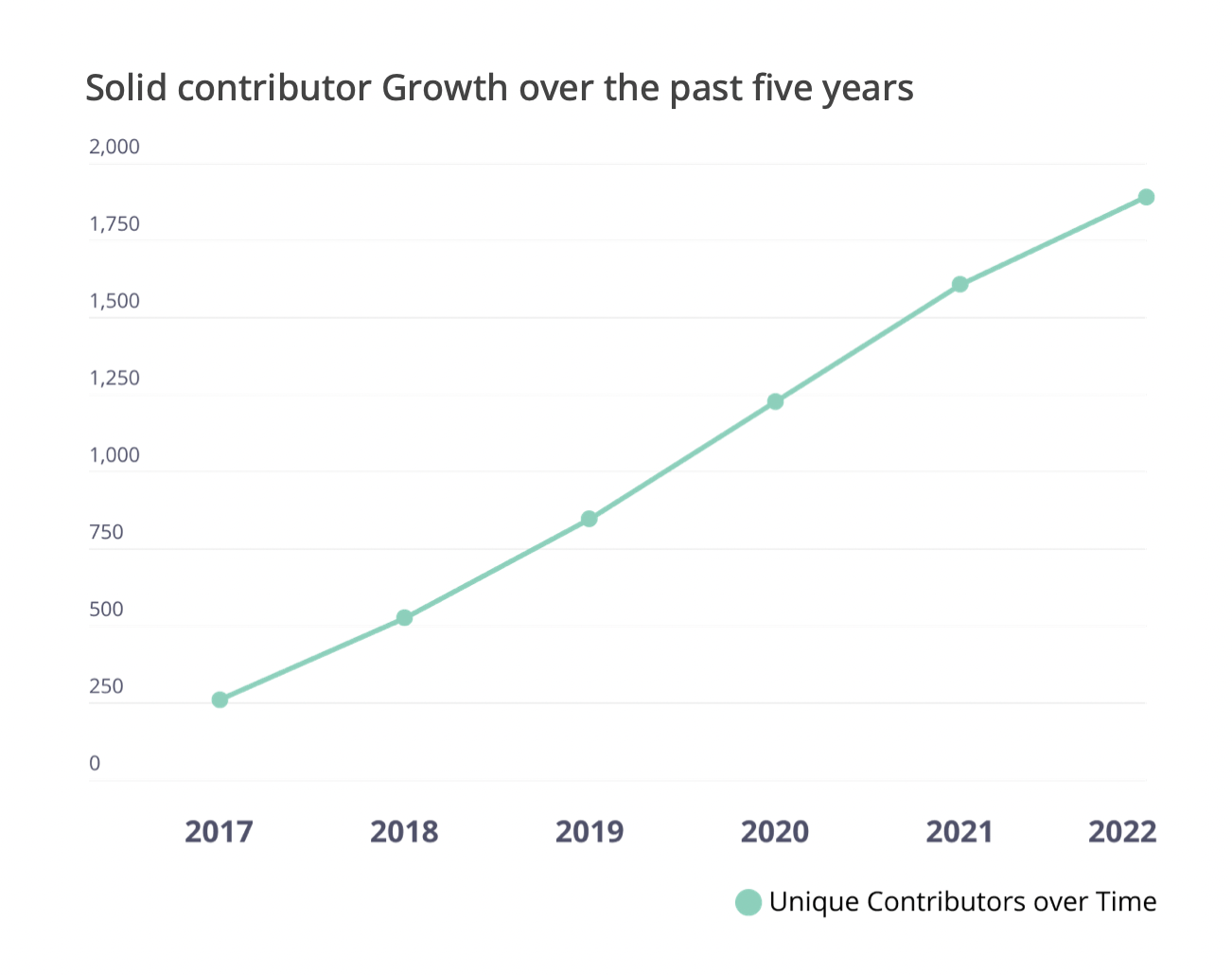
One of the interesting metrics that the report provides is information on who is working on the open source drone ecosystem. Auterion, the company led by PX4 creator Lorenz Meier, led contributions: but the entire pool of contributors has grown dramatically over the last 2 years.
The growth in contributors translates into the growth in open source powered drones, like the aircraft from Watts Innovation, Freefly Systems, Quantum Systems, and Avy. From the report:
Pixhawk and PX4 are now ubiquitous drone technologies. They help create an ecosystem of interoperability, which leads to users having more choice and flexibility. Creating an open drone ecosystem around these technologies was the goal, and it’s finally happening!
“It’s great to see open source drone technologies like Pixhawk and PX4 everywhere,” said Lorenz Meier, Co-founder and CEO at Auterion. “We know the power of open collaboration, we’ve seen it work. Now, we need to do even less individually. That means standardizing hardware before we reach the point where it becomes unmaintainable. Together we can share the workload and allow everyone to excel.”
The full report is worth a look, answering questions about how the Dronecode Foundation works and providing links and descriptions to their projects: PX4 Autopilot, MAVLink, MAVSDK, QGroundControl, and Pixhawk.
Read more:
- Dronecode and the PX4 Open Source Drone Platform: the Benefits of Open Source, and What Comes Next
- Dronecode Foundation Hosts the PX4 Autopilot Developer Summit Next Month: Open Source Drone Projects
- Pixhawk Releases Latest Open Standards: Helping Manufacturers Get New Drones On the Market, Faster
- An Open Source Drone Platform is More Relevant than Ever: Auterion’s Romeo Durscher
Miriam McNabb is the Editor-in-Chief of DRONELIFE and CEO of JobForDrones, a professional drone services marketplace, and a fascinated observer of the emerging drone industry and the regulatory environment for drones. Miriam has penned over 3,000 articles focused on the commercial drone space and is an international speaker and recognized figure in the industry. Miriam has a degree from the University of Chicago and over 20 years of experience in high tech sales and marketing for new technologies.
For drone industry consulting or writing, Email Miriam.
TWITTER:@spaldingbarker
Subscribe to DroneLife here.






[…] 資料來源:DroneLife […]