 KEF Robotics uses digital twins to devise system to guide tethered drones
KEF Robotics uses digital twins to devise system to guide tethered drones
By DRONELIFE Features Editor Jim Magill
Drones tethered to mobile vehicles can provide a huge benefit to military forces, by being able to provide warfighters with visual and other kinds of data from a bird’s-eye perspective, in a variety of environments and situations.
One downside to having drones tethered to moving vehicles, however, is the hazard that potential obstacles such as tree limbs or low-hanging traffic lights could impose, potentially causing damage to the drone, the tether or the vehicle itself. A small, Pittsburgh-based software company is developing a solution to this problem, using artificial intelligence (AI) and machine-learning algorithms to help the drone “see” the obstacles from a safe distance and avoid them.
KEF Robotics is using funding from the U.S. Department of Defense (DoD) to develop a smart system for safely guiding tethered drones. The company has implemented the Falcon simulator, produced by Duality AI, to create different scenarios to train its autonomy systems to avoid obstacles in real-world situations.
Working under a program established by the U.S. Army’s Next Generation Combat Vehicle Group, KEF is developing a relatively inexpensive infrared and electro-optical camera-based system that can detect power lines and other hazards in the path of a vehicle and attached tethered drone.
“The DOD wants to move these through challenging urban environments at high speeds, and we’re building a system that can detect hazards far enough away that you can plan the path of the aircraft and fly underneath the hazards or otherwise avoid them,” Fraser Kitchell, CEO of KEF Robotics, said in an interview.
KEF is one of a handful of companies competing to develop such a system for the Army. The development of the KEF system is somewhere between the laboratory testing phase and the verification phase of conducting a prototype demonstration in an operational environment, Kitchell said.
“We’ve deployed the algorithms on ground vehicles, but we haven’t yet flown with a tethered aircraft and a ground vehicle processing all the information at the same time,” he said. “That is a critical step.”
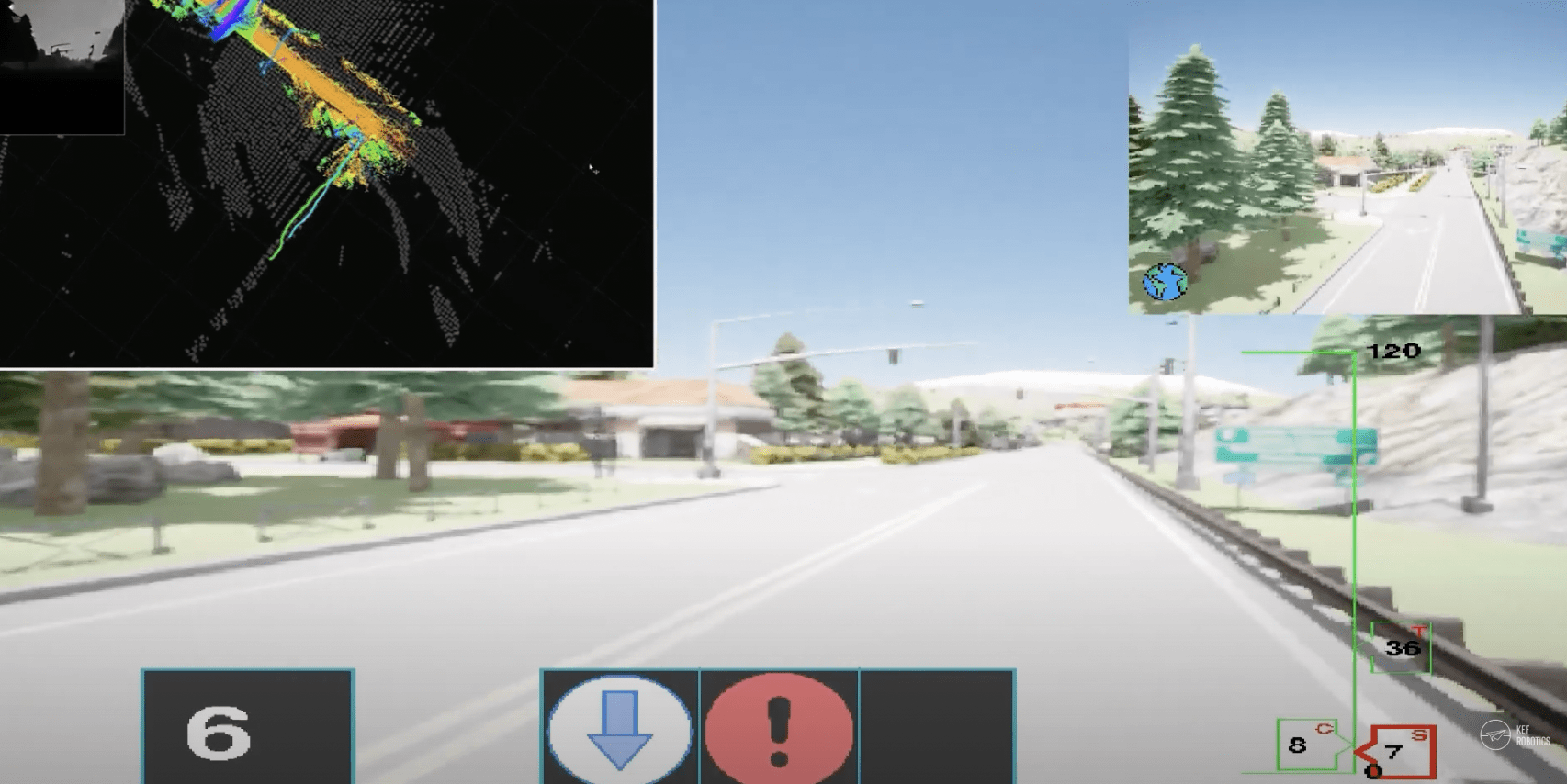 The system includes a large number of cameras, allowing the operator to build a very complex map of the environment as they are moving through it. Processing that volume of data in real time is one of the biggest challenges that system designers face.
The system includes a large number of cameras, allowing the operator to build a very complex map of the environment as they are moving through it. Processing that volume of data in real time is one of the biggest challenges that system designers face.
Employing drones tethered to vehicles provides many advantages compared with other forms of surveillance, such as the use of untethered UAVs.
“The tethered aircraft allows you to keep the aircraft up nearly perpetually because you can power it off a ground vehicle,” Kitchell said. “And you have this secure data link between the aircraft and the ground vehicle. You can capture data on board the aircraft and send it down an ethernet cable to the ground vehicle.”
For the Army to deploy tethered drones in conjunction with its next generation of combat vehicles, currently under development, requires solving the obstacle-avoidance problem.
“The Army first came to us and they said, ‘We want to understand how we can use state-of-the art computer-vision techniques to improve the range at which we can detect hazards,’” Kitchell said. The Army’s charge to its vendors was to develop a low-cost navigation system that could be easily and inexpensively adapted to be deployed on multiple vehicles. What the army wants to accomplish through its next-generation combat vehicle program is to provide each vehicle with “its own tiny air force,” he said.
A number of vendors are vying for the DoD contract to produce the next-generation combat vehicles, with the selection expected to take place sometime next year or early in 2025.
Kitchell said this means that field testing of the KEF system on the newly produced vehicles is probably three or four years in the future.
KEF researchers employ Duality’s simulators to create digital twins of real-world environments to teach the software how to avoid obstacles that the tethered drone might encounter.
“The foundational level of this project for us to create these environments, drive through them with our system and our sensors a large number of times, and then assess which algorithms and which sensors would be likely to perform going forward,” he said.
One of the constraints the Army placed on potential software vendors was to keep the per-unit cost of their systems low.
“Don’t go out there and use that $100,000 infrared camera. Try and use the $7,000 infrared camera and the $600 EO camera and the computer that you can buy at the local hardware store or the local computer store,” Kitchell said.
In order to satisfy the Army’s budget-minded requirements, KEF employs high-resolution cameras that capture visual images, rather than more expensive and more sophisticated data-recording technology such as LiDAR or radar.
“We want to have solutions that don’t emit radio frequencies or electromagnetic frequencies. We try to be a passive, simpler system, a lower-cost system.”
Recent advances in cell-phone technology have resulted in the development of smaller and more powerful cameras that are also relatively inexpensive. The company is currently experimenting with different camera types, fields of view and camera modalities to determine the best camera configuration to use to create a system that can detect hazards at an optimal range.
“Say you wanted to detect a power line at 2 kilometers away. What kind of camera do you need? What should the field of view be? Is that camera available off the shelf today?” Kitchell asked.
Although the DoD is the biggest funding contributor to the tethered drone software project and the initial use of the software will be a military application, he said the company’s ultimate goal is to develop a system that can be offered to commercial markets.
“We’re absolutely trying to commercialize everything we do at KEF. And Duality is very interested in that too,” he said.
 Jim Magill is a Houston-based writer with almost a quarter-century of experience covering technical and economic developments in the oil and gas industry. After retiring in December 2019 as a senior editor with S&P Global Platts, Jim began writing about emerging technologies, such as artificial intelligence, robots and drones, and the ways in which they’re contributing to our society. In addition to DroneLife, Jim is a contributor to Forbes.com and his work has appeared in the Houston Chronicle, U.S. News & World Report, and Unmanned Systems, a publication of the Association for Unmanned Vehicle Systems International.
Jim Magill is a Houston-based writer with almost a quarter-century of experience covering technical and economic developments in the oil and gas industry. After retiring in December 2019 as a senior editor with S&P Global Platts, Jim began writing about emerging technologies, such as artificial intelligence, robots and drones, and the ways in which they’re contributing to our society. In addition to DroneLife, Jim is a contributor to Forbes.com and his work has appeared in the Houston Chronicle, U.S. News & World Report, and Unmanned Systems, a publication of the Association for Unmanned Vehicle Systems International.
Read more:
- KHRONOS: the Tethered Drone System for Challenging Environments
- Verizon’s Response Team Launches Tethered Drone to Restore Communications to Sanibel Island
- AeroVironment Acquires Planck Aerosystems: Tethered Sensor Systems, Flight Autonomy Solutions
- Zenith AeroTech Tethered Drones Delivered to Federal Law Enforcement: the Ultimate Overwatch Solution

Miriam McNabb is the Editor-in-Chief of DRONELIFE and CEO of JobForDrones, a professional drone services marketplace, and a fascinated observer of the emerging drone industry and the regulatory environment for drones. Miriam has penned over 3,000 articles focused on the commercial drone space and is an international speaker and recognized figure in the industry. Miriam has a degree from the University of Chicago and over 20 years of experience in high tech sales and marketing for new technologies.
For drone industry consulting or writing, Email Miriam.
TWITTER:@spaldingbarker
Subscribe to DroneLife here.






[…] company announced that it is exploring an infrared and electro-optical (EO) camera-based system that allows drones […]