
- Prototyping of drones and robotic solutions
- Autonomous navigation of drones and robots
- 3D mapping
- Stereo camera and a sensor array (IMU, barometer, magnetometer, ultrasound)
With an embedded NVIDIA® Tegra® K1 processor, ParrotS.L.A.M.dunk allows implementation of the latest algorithms of computer vision and autonomous navigation that are optimised for NVIDIA® GPU. In addition, the ParrotS.L.A.M.dunk is optimised to minimally impact the battery life of the drone.
The ParrotS.L.A.M.dunk integrates several sensors:
- A fish-eye stereo camera with a 1500×1500 resolution at 60fps
- An Inertial Measurement Unit (IMU)
- An ultrasound sensor
- A magnetometer
- A barometer
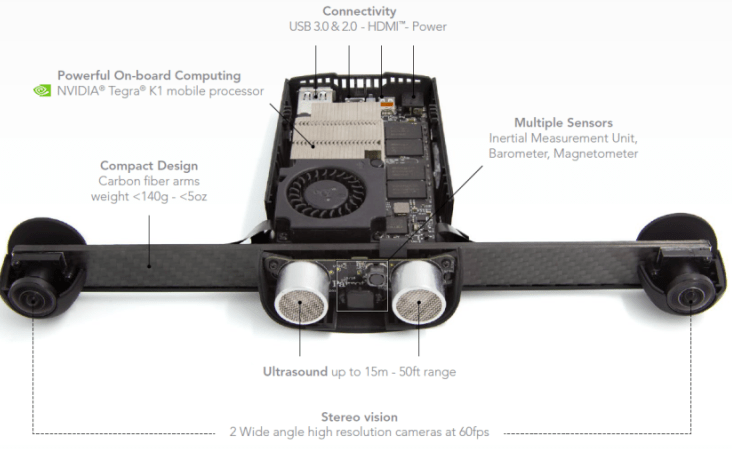
Weighing less than 4.9oz (140g), Parrot S.L.A.M.dunk fits on various types of Linux-based drones and robotic platforms including quadcopters and fixed-wings, rolling robots and articulated arms, with the help of mount kits. The product is expected to be available in Q4 2016. More information will be posted to http://developer.parrot.com/



Frank Schroth is editor in chief of DroneLife, the authoritative source for news and analysis on the drone industry: it’s people, products, trends, and events.
Email Frank
TWITTER:@fschroth